Тендеры и лиды
Информация

ООО "Меркатор Холдинг"
Промышленность и оборудование
Россия, Москва
Июнь 2023
Компания «Меркатор Холдинг» разработала беспилотную электрическую машину «Пиксель» для уличной уборки. Робот просчитывает траекторию движения, обходит препятствия и управляет щетками. Нас попросили разработать удобный и понятный интерфейс для ручного управления роботом.
В первую очередь мы провели собственное UX-исследование, чтобы понять, как эта задача была реализована для других объектов. Изучили пульты радиуправляемых машин и игровые интерфейсы гоночных симуляторов. Так мы поняли потребности водителей и то, как они подходили к управлению. Нам было важно создать такой интерфейс, чтобы человеку, работающему в нем, не нужно было разбираться с инструкциями. По нашей логике пользователь заходит в приложение и сразу понимает, куда нажимать, какой индикатор за что отвечает.

Главная сложность — избежать перегруза на экране. Робот много всего умеет, и важно, чтобы у пользователя был полный доступ ко всей опциям управления без переключений между экранами. При этом здесь же должны находиться важные индикаторы: состояние, уровень заряда, скорость и так далее.
Для решения этой задачи мы:
- Взяли привычный для водителей дизайн панели управления электромобилями;
- Зонировали экран, предусмотрели пустые области, чтобы не перегружать экран;
- Продумали различное управление для колес и щетки робота;
Разработали визуальные элементы для передачи состояния робота — уровня заряда, скорости, температуры нагрева, статуса и так далее.
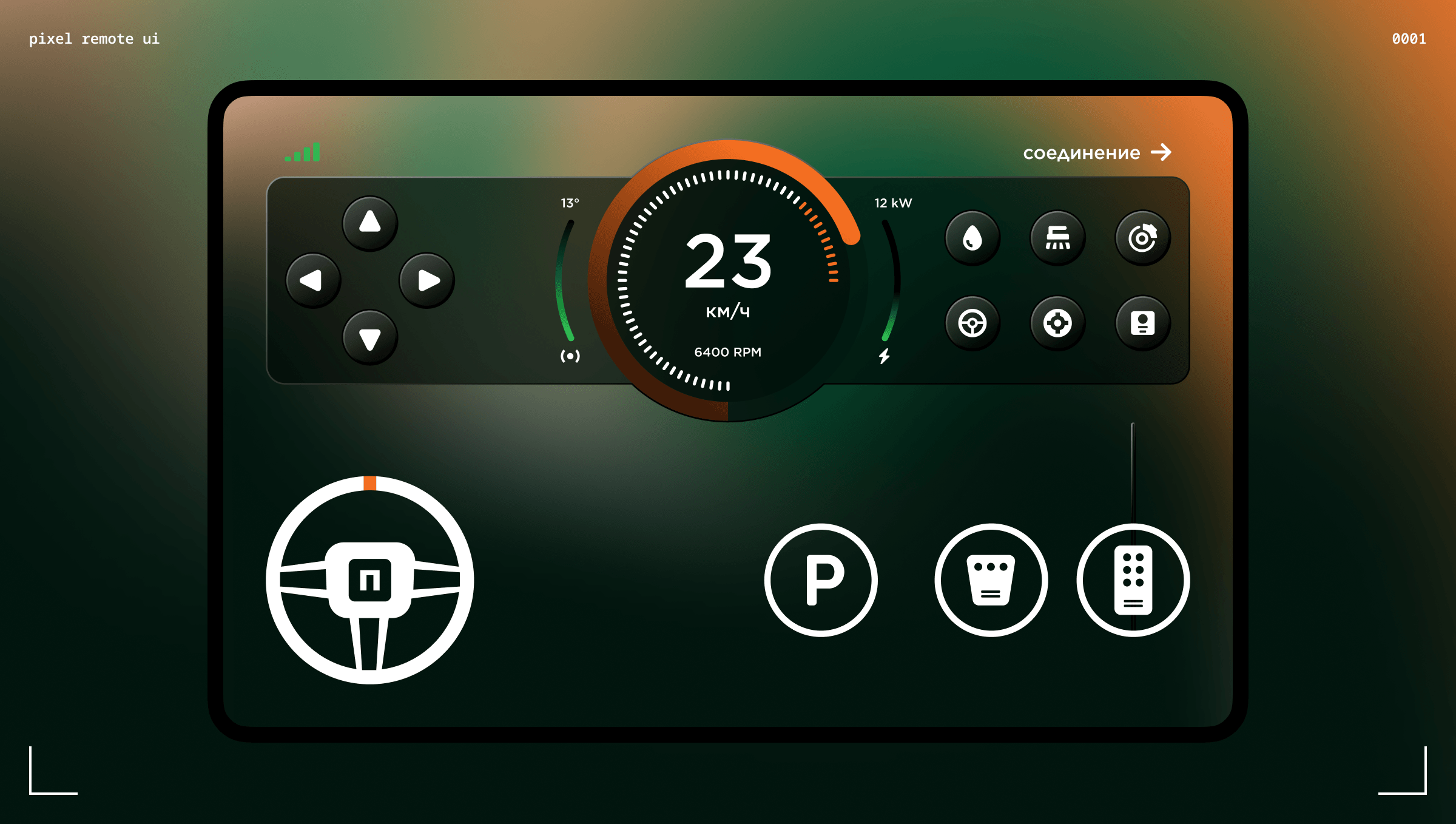
После реализации интерфейса в готовом приложении мы проверили правильность своих гипотез: попросили заказчика протестировать пульт в цеху, подключив к нему робота. Это позволило оптимизировать приложение, исправить несколько ошибок. Например, в первом варианте для управления роботом нужно было крутить виртуальный руль, но это оказалось неудобно. Так руль превратился в ползунок, перемещая который, можно задавать движение робота.
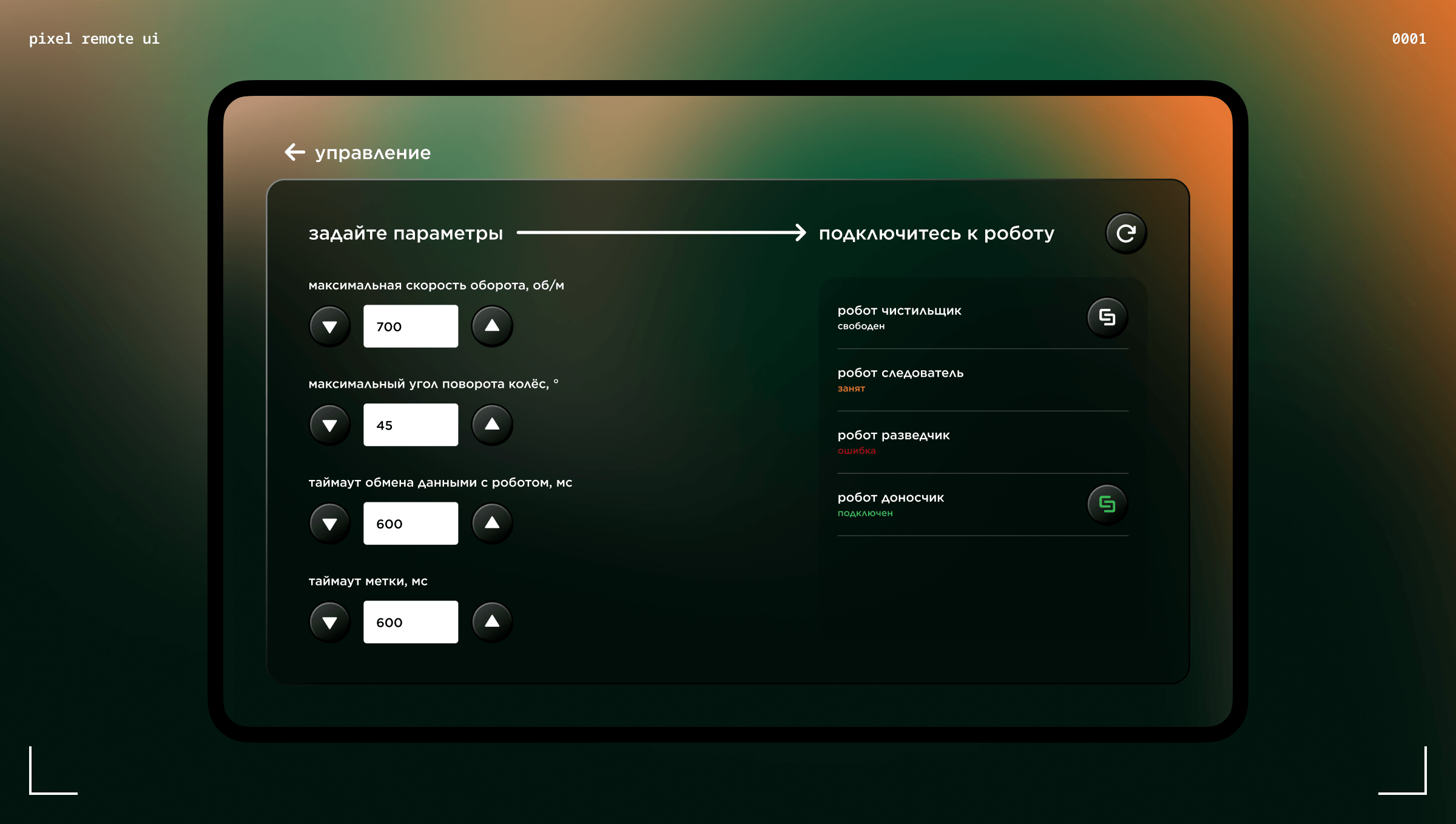
Разработанный интерфейс позволяет управлять сразу несколькими роботами, переключаясь между ними. Пользователь может задавать траекторию движения, регулировать работу щетки, проверять уровень заряда робота и возвращать его на базу.

Соколов Евгений
Руководитель КБ ЦП / SmartLab
Parkside подключились к работе нашей Лаборатории Умной Разработки и участвовали в создании визуализации управления. В их зоне ответственности было проектирование и дизайн проекта. Для его реализации нужно было учитывать многочисленные технические ограничения и особенности работы. Команда внимательно подошла к задаче, смогли разобраться с ней в кратчайшие сроки и учли все необходимые условия и технические нюансы. Несмотря на то что требования к данным в интерфейсе менялось несколько раз, они оперативно адаптировали систему в соответствии с обновляемыми стандартами. На выходе у нас получился продукт, полностью соответствующий поставленным требованиям и макетам.






