Тендеры и лиды
Информация
Цифровой Прорыв
Информационные технологии и интернет
Россия
Июнь 2022
Необходимо разработать алгоритм для группы интеллектуальных роботов в мультиагентной среде на основе методов искусственного интеллекта и/или PO-MAPF.
Созданная стратегия поможет достичь им целей максимально эффективно и без столкновений друг с другом. Решение кейса имеет широкую область применения от логистических задач на железных дорогах, складах, перекрестках и других транспортных узлах до проектирования автопилотируемых автомобилей.
Поиск удачного алгоритма - это итерационный процесс.
Вот, что удалось сделать за пару дней:
1. В классическом алгоритме для вычисления ближайшего расстояния от агента до цели используется Манхэттенское расстояние, мы поменяли его на Евклидово.
2. Далее была добавлена история посещения каждым конкретным агентом каждой конкретной точки на карте. Стали следить за количеством посещений, если количество посещений одной и той же точки слишком велико, то мы либо случайным образом выбираем одно из пяти действий (пропуск хода, влево, вправо, вниз, вверх), для того, чтобы «заставить» его отклониться от маршрута, либо «заставляем» его «замереть» на несколько ходов. Это позволяет другим роботам в этот момент удалиться от места столкновения.

Несмотря на четкость изложения проблемы, это сложная для выполнения задача, поскольку научить множество агентов с помощью современных обучаемых нейросетевых методов за двое суток.
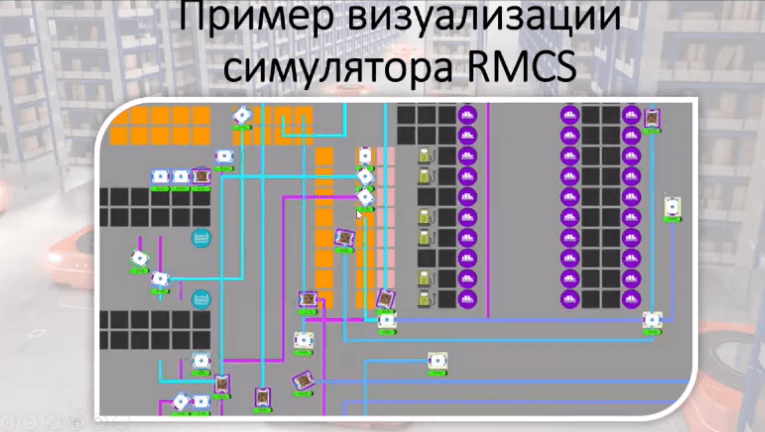
Разработанный прототип является отдельным модулем по планированию траекторий в RMCS (Robot multi control system). Одной из сфер применения флота AGV/AMR является логистика, где на складах необходимо роботизировать процессы размещения и подбора.

DS ИИ сервисы и поддержка с удовольствием обсудит вашу задачу


